#include <tactic.h>
Public Member Functions | |
| Tactic (const std::set< RobotCapability > &capability_reqs_) | |
| virtual bool | done () const =0 |
| virtual std::string | getFSMState () const =0 |
| const std::set< RobotCapability > & | robotCapabilityRequirements () const |
| std::set< RobotCapability > & | mutableRobotCapabilityRequirements () |
| void | setLastExecutionRobot (std::optional< RobotId > last_execution_robot) |
| std::map< RobotId, std::shared_ptr< Primitive > > | get (const WorldPtr &world_ptr) |
| virtual void | accept (TacticVisitor &visitor) const =0 |
Protected Attributes | |
| std::optional< RobotId > | last_execution_robot |
Detailed Description
In the STP framework, a Tactic represents a role or objective for a single robot. This can be thought of as a "position" on a typical soccer team. Some examples are:
- The goalie
- A "striker" that tries to get the ball and shoot on the enemy goal
- A defender that shadows enemy robots
- A passer
- A receiver (for a pass)
Tactics are stateful, and use Primitives to implement their behaviour. They also make heavy use of our Evaluation functions in order to help them make decisions.
Constructor & Destructor Documentation
◆ Tactic()
|
explicit |
Member Function Documentation
◆ accept()
|
pure virtual |
Accepts a Tactic Visitor and calls the visit function on itself
- Parameters
-
visitor A Tactic Visitor
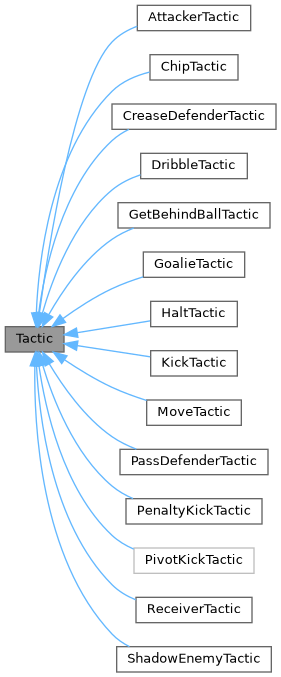
Implemented in AttackerTactic, ChipTactic, CreaseDefenderTactic, DribbleTactic, GetBehindBallTactic, GoalieTactic, HaltTactic, KickTactic, MoveTactic, PassDefenderTactic, PenaltyKickTactic, PivotKickTactic, ReceiverTactic, and ShadowEnemyTactic.
◆ done()
|
pure virtual |
◆ get()
| std::map< RobotId, std::shared_ptr< Primitive > > get | ( | const WorldPtr & | world_ptr | ) |
Updates and returns a set of primitives for all friendly robots from this tactic
- Parameters
-
world The updated world
- Returns
- the next primitive
◆ getFSMState()
|
pure virtual |
Gets the FSM state of the tactic
- Returns
- the FSM state
◆ mutableRobotCapabilityRequirements()
| std::set< RobotCapability > & mutableRobotCapabilityRequirements | ( | ) |
Mutable robot hardware capability requirements of the tactic.
- Returns
- the Mutable robot hardware capability requirements of the tactic
◆ robotCapabilityRequirements()
| const std::set< RobotCapability > & robotCapabilityRequirements | ( | ) | const |
robot hardware capability requirements of the tactic.
- Returns
- the robot capability requirements
◆ setLastExecutionRobot()
| void setLastExecutionRobot | ( | std::optional< RobotId > | last_execution_robot | ) |
Updates the last execution robot
- Parameters
-
last_execution_robot The robot id of the robot that last executed the primitive for this tactic
The documentation for this class was generated from the following files:
- src/software/ai/hl/stp/tactic/tactic.h
- src/software/ai/hl/stp/tactic/tactic.cpp