Loading...
Searching...
No Matches
Public Member Functions |
Static Public Member Functions |
Protected Member Functions |
Protected Attributes |
List of all members
Polygon Class Reference
#include <polygon.h>
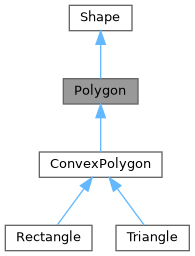
Inheritance diagram for Polygon:
Collaboration diagram for Polygon:
Public Member Functions | |
| Polygon (const std::vector< Point > &points) | |
| Polygon (const std::initializer_list< Point > &points) | |
| Point | centroid () const |
| Polygon | expand (double expansion_amount) const |
| double | perimeter () const |
| const std::vector< Segment > & | getSegments () const |
| const std::vector< Point > & | getPoints () const |
Static Public Member Functions | |
| static Polygon | fromSegment (const Segment &segment, double length_radius, double width_radius) |
| static Polygon | fromSegment (const Segment &segment, double radius) |
Protected Member Functions | |
| void | initSegments () |
Protected Attributes | |
| std::vector< Point > | points_ |
| std::vector< Segment > | segments_ |
Detailed Description
A shape composed of line segments.
Constructor & Destructor Documentation
◆ Polygon() [1/2]
◆ Polygon() [2/2]
Member Function Documentation
◆ centroid()
| Point centroid | ( | ) | const |
Returns the centroid of this polygon
- Returns
- The centroid of this polygon
◆ expand()
| Polygon expand | ( | double | expansion_amount | ) | const |
◆ fromSegment()
Creates a rectangular polygon that is oriented along the segment. The radius defines the closest distance to a edge of the rectangle parallel to the segment i.e. the radius is half the width of the rectangle. The polygon contains both points as "focal" points similar to an ellipse. see definition for details and diagram
- Parameters
-
segment segment along which to construct the rectangular polygon length_radius How much each end of the segment should be elongated by width_radius How wide should the polygon be, measured from the segment
- Returns
- an oriented polygon along the 2 points that contains both points.
◆ getPoints()
| const std::vector< Point > & getPoints | ( | ) | const |
Returns the points that form the polygon.
- Returns
- the points that form the polygon.
◆ getSegments()
| const std::vector< Segment > & getSegments | ( | ) | const |
Returns the line segments that form this polygon.
- Returns
- the line segments that form this polygon.
◆ initSegments()
|
protected |
Initializes the segments_ vector
◆ perimeter()
| double perimeter | ( | ) | const |
Returns perimeter length of the polygon
- Returns
- perimeter length of the polygon
The documentation for this class was generated from the following files:
- src/software/geom/polygon.h
- src/software/geom/polygon.cpp