Loading...
Searching...
No Matches
GeomObstacle< GEOM_TYPE > Class Template Reference
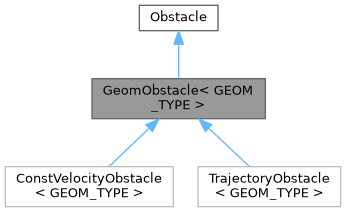
Inheritance diagram for GeomObstacle< GEOM_TYPE >:
Collaboration diagram for GeomObstacle< GEOM_TYPE >:
Public Member Functions | |
| GeomObstacle (const GEOM_TYPE &geom) | |
| bool | contains (const Point &p, const double t_sec=0) const override |
| double | distance (const Point &p, const double t_sec=0) const override |
| double | signedDistance (const Point &p, const double t_sec=0) const override |
| bool | intersects (const Segment &segment, const double t_sec=0) const override |
| Point | closestPoint (const Point &p) const override |
| TbotsProto::Obstacle | createObstacleProto () const override |
| Rectangle | axisAlignedBoundingBox (double inflation_radius=0) const override |
| std::string | toString (void) const override |
| void | accept (ObstacleVisitor &visitor) const override |
| std::vector< Point > | rasterize (const double resolution_size) const override |
| const GEOM_TYPE | getGeom (void) const |
Protected Attributes | |
| const GEOM_TYPE | geom_ |
Constructor & Destructor Documentation
◆ GeomObstacle()
template<typename GEOM_TYPE >
|
explicit |
Construct a static GeomObstacle with GEOM_TYPE
- Parameters
-
geom GEOM_TYPE to make obstacle with
Member Function Documentation
◆ accept()
template<typename GEOM_TYPE >
|
overridevirtual |
◆ axisAlignedBoundingBox()
template<typename GEOM_TYPE >
|
overridevirtual |
◆ closestPoint()
◆ contains()
template<typename GEOM_TYPE >
|
overridevirtual |
◆ createObstacleProto()
template<typename GEOM_TYPE >
|
overridevirtual |
◆ distance()
template<typename GEOM_TYPE >
|
overridevirtual |
Gets the minimum distance from the obstacle to the point
- Returns
- distance to point
Implements Obstacle.
Reimplemented in TrajectoryObstacle< GEOM_TYPE >.
◆ getGeom()
template<typename GEOM_TYPE >
| const GEOM_TYPE getGeom | ( | void | ) | const |
Gets the underlying GEOM_TYPE
- Returns
- geom type
◆ intersects()
template<typename GEOM_TYPE >
|
overridevirtual |
◆ rasterize()
template<typename GEOM_TYPE >
|
overridevirtual |
◆ signedDistance()
template<typename GEOM_TYPE >
|
overridevirtual |
Gets the signed distance from the obstacle's perimeter to the point. That is, if point is inside the obstacle then distance will be negative. See https://iquilezles.org/articles/distfunctions2d/ for details on the maths
- Returns
- distance from point to nearest point on perimeter of obstacle. Positive if outside, negative if inside
Implements Obstacle.
Reimplemented in TrajectoryObstacle< GEOM_TYPE >.
◆ toString()
template<typename GEOM_TYPE >
|
overridevirtual |
Output string to describe the obstacle
- Returns
- string that describes the obstacle
Implements Obstacle.
The documentation for this class was generated from the following file:
- src/software/ai/navigator/obstacle/geom_obstacle.hpp